
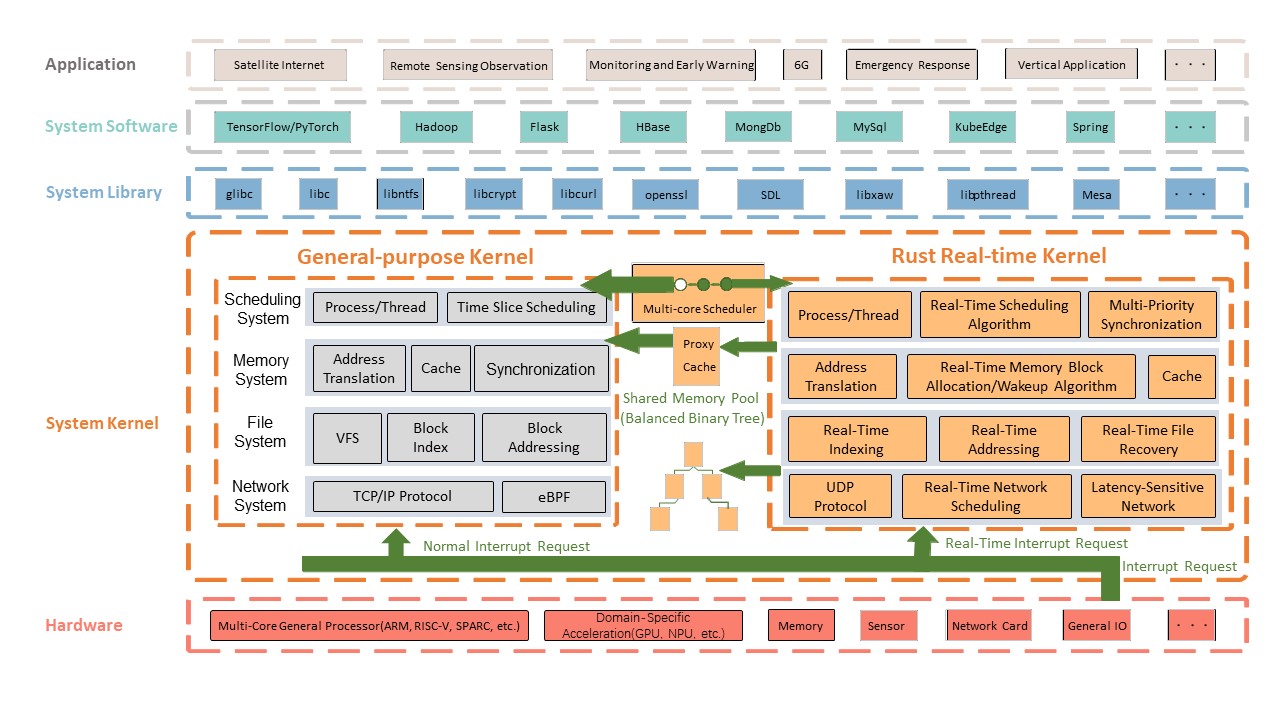
Ядро RROS совместимо с большинством обычных Linux программ, но при этом предоставляет возможности по работе в режиме реального времени, превосходящие RT-Linux и рассчитанные на использование в критических системах, таких как бортовые и вспомогательные компьютеры спутников, промышленные и автомобильные системы. Linux-ядро основано на ветке 5.13 и применяется для выполнения задач общего назначения, таких как сжатие данных и обработка моделей машинного обучения, а RTOS-ядро используется для специализированных задач с гарантированным временем отклика, таких как позиционирование в пространстве, сбор научных данных и коммуникации.
Ядро совместимо с real-time API, предоставляемым библиотекой libevl, и использует архитектуру с двойным ядром, предложенную проектом Xenomai/EVL. RTOS-ядро содержит отдельный планировщик задач и механизмы синхронизации, свои реализации потоков и процессов, уровень трансляции адресов, подсистему выделения памяти, кэш, сетевой стек с поддержкой протокола UDP. Разработка заняла два года и была выполнена исследовательской группой из Пекинского университета почты и телекоммуникаций.
Источник: http://www.opennet.ru/opennews/art.shtml?num=60285